|
Getting your Trinity Audio player ready...
|
¿Qué necesitas aprender para programar un robot hoy en día?
💙 El amor se construye, como los robots.
Descubre “El mejor Master de Programación” solo en CIPSA
Aprende a programar fácilmente y a tu ritmo, desde cualquier nivel.
¿Qué lenguajes de programación necesito para crear un robot?
- Debes conocer cómo funcionan las aplicaciones informáticas, y aprender a crear una desde cero, el lenguaje más habitual que se utiliza es el lenguaje de programación C#, con el que puedes programar todo tipo de funciones para gestionar el robot, crear espacios de trabajo virtuales para hacer simulaciones previas en 3D, como si hicieras un videojuego, y entrenar a tu “robot”.
- Luego a la par deberías aprender el lenguaje que gestiona el robot en sí, la maquinaria, y este es C++, con el que adaptas los sensores y conectas sus funciones a la app creada con C# para gestionar el aparato. En este nivel sería como crear un robot Roomba que tiene un plano de la casa en base a hacer un recorrido con láser de tu casa.
- Finalmente necesitarás saber Python, el lenguaje que se utiliza por excelencia en los modelos de IA, para que tu robot automatice funciones prácticas y sea útil para el objetivo que sea.
Aunque C++ y Python dominan el panorama, C# tiene un lugar muy específico y valioso en la robótica moderna. No se suele usar para controlar los motores directamente (el “bajo nivel”), sino para todo lo que rodea al robot.
Aquí tienes sus usos principales de los diferentes lenguajes de programación utilizados en robótica:
Interfaces de Control (HMI)
C# es el lenguaje rey para crear aplicaciones de escritorio en Windows. Muchos ingenieros lo usan para diseñar el panel de control desde el cual un humano supervisa al robot.
-
Uso: Botones de parada de emergencia, visualización de cámaras, telemetría y cuadros de mando.
-
Herramientas: Windows Forms o WPF (Windows Presentation Foundation).
Simulación y Unity 3D
Esta es la mayor fuerza de C# hoy en día. Unity, el motor de videojuegos, se usa muchísimo en robótica para crear entornos virtuales antes de probar el robot en el mundo real.
-
Uso: Entrenamiento de robots mediante “Reinforcement Learning” (Aprendizaje por Refuerzo) y gemelos digitales (Digital Twins).
-
Ventaja: C# permite programar comportamientos físicos complejos dentro del simulador de forma muy sencilla.
Programación de Robots Industriales (KUKA)
Uno de los fabricantes de robots más importantes del mundo, KUKA, utiliza una tecnología llamada Sunrise.OS para sus robots colaborativos (como el LBR iiwa).
-
Uso: Estos robots se programan directamente usando una variante de Java o frameworks basados en C# / .NET. Esto permite que el robot se integre fácilmente con bases de datos y sistemas de gestión de fábricas.
Integración con el Ecosistema Microsoft
En entornos industriales que dependen de la infraestructura de Microsoft, C# es la opción natural:
-
Azure IoT: Para conectar flotas de robots a la nube y analizar datos en tiempo real.
-
Hololens: Para controlar robots mediante Realidad Aumentada (programado en C# con Unity).
Resumen de comparación de lenguajes de programación y su utilidad:
| Característica | C++ | Python | C# |
| Velocidad | Máxima (Tiempo real) | Lenta | Alta |
| Dificultad | Media | Media | Media |
| Uso principal | Motores y Sensores | IA y Prototipado | Simuladores e Interfaces |
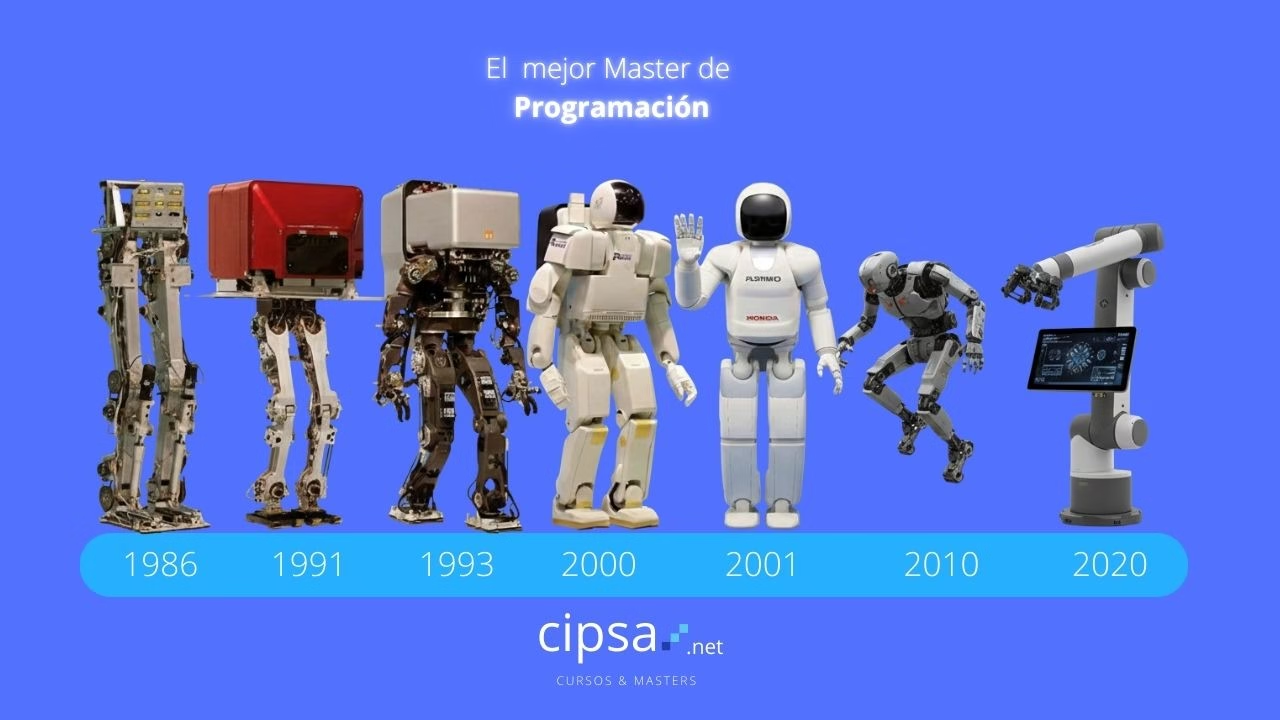
Historia de la robótica y los lenguajes de programación que se utilizaron en cada caso
Es fascinante ver cómo los lenguajes han evolucionado a la par de las máquinas.
En los hitos más importantes de la robótica la programación pasó de ser puramente mecánica a convertirse en código de alta complejidad.
Aquí tienes qué “lenguaje” utilizaban cada uno de los robots que cambiaron la historia.
Antigüedad y autómatas complejos.
Antes de que existiera la palabra “robot”, el ser humano ya soñaba con seres artificiales:
Mitos: En la antigua Grecia, se hablaba de Talos, un gigante de bronce que protegía Creta.
Ingeniería mecánica autómatas:
Siglo XII
Al-Jazari diseñó máquinas hidráulicas automáticas.
Al-Jazari (1136–1206) fue un polímata e ingeniero kurdo (Mesopotamia Cizre – Turquía), considerado el “padre de la robótica” por crear los algoritmos como vimos en el artículo de este mismo blog sobre la Historia de la Inteligencia Artificial, autómatas programables, relojes hidráulicos y sistemas de ingeniería avanzados. Su obra, El libro del conocimiento de ingeniosos dispositivos mecánicos, detalla más de 50 inventos que incluyen árboles de levas, cigüeñales y máquinas de bombeo de agua.
Al-Jazari’s Elephant Clock
Siglo XV
1495. Leonardo da Vinci (siglo XV) diseñó un caballero mecánico que podía sentarse y mover los brazos, el primer robot mecánico antropomorfo, estilo humanoide, para no tener que utilizar personas vivas en las guerras.

Siglo XVIII
Jacques de Vaucanson revolucionó el mundo con sus autómatas de tamaño natural, máquinas que no solo entretenían, sino que desafiaban la biología.
Su obra más polémica fue el “Pato Digestor” (1738): una joya de ingeniería hidráulica que bebía, graznaba y —sorprendentemente— simulaba digerir y excretar comida.
Su ingenio no acabó ahí; con “El Flautista” y “El Tamborilero”, logró que figuras mecánicas soplaran aire real y ejecutaran melodías perfectas. Más que simples juguetes, estos inventos fueron el primer intento moderno de replicar la vida mediante la mecánica.
-
Lenguaje: Mecánica y Levas.
-
No existía el código digital. Estos robots se “programaban” mediante levas metálicas, engranajes y cilindros con muescas (similares a los de una caja de música). La secuencia de movimientos estaba grabada físicamente en la forma de las piezas.

1961 El primer robot industrial. Robot Unimate.
-
El Unimate grababa sus movimientos en un tambor magnético. Se utilizaba un lenguaje de muy bajo nivel (cercano al código máquina) para controlar la posición de los ejes.
-
Más tarde, la empresa Unimation desarrolló VAL (Victorian Arm Language), uno de los primeros lenguajes de programación específicos para robots.


+ info: https://www.editores.com.ar/revistas/ie/322/joseph_engelberger
1966 Shakey. El robot que razonaba.
-
Lenguaje: LISP.
-
Shakey fue revolucionario porque utilizaba LISP (List Processing), el lenguaje dominante en la Inteligencia Artificial en esa época. LISP permitía a Shakey “pensar” y planificar tareas en lugar de solo repetir movimientos. También utilizaba un sistema llamado STRIPS para la planificación lógica.


Sven Wahlstrom y Nils Nilsson con el robot Shakey. Foto: SRI.
+ info: https://www.wired.com/2013/09/tech-time-warp-shakey-robot/
1997 Sojourner. Robot Rover de Marte.
-
Lenguaje: C.
-
Para misiones espaciales, la eficiencia y la fiabilidad son críticas. El Sojourner utilizaba C debido a su capacidad para gestionar el hardware con muy pocos recursos de memoria y energía. Corría sobre un sistema operativo de tiempo real llamado VxWorks.

Robot Rover de la NASA en Marte.
+ info: https://www.rtve.es/noticias/20111126/nasa-lanza-curiosity-su-mision-mas-ambiciosa-a-superficie-marte/477963.shtml
2000 ASIMO
-
Lenguaje: C y C++.
-
Honda desarrolló sistemas propietarios extremadamente complejos. Se utilizó C++ por su capacidad para gestionar la programación orientada a objetos, permitiendo controlar por separado (pero de forma coordinada) el equilibrio, la visión y el movimiento de las extremidades en tiempo real.

Asimo Robot
+ info: https://global.honda/en/newsroom/news/2000/c001120b-eng.html
2000 Plataforma robótica média. Sistema quirúrgico Da Vinci
El sistema quirúrgico Da Vinci es una plataforma robótica avanzada para cirugía mínimamente invasiva, aprobada desde el año 2000, que mejora la precisión, visión y control del cirujano.
Utiliza brazos robóticos controlados desde una consola en 3D para realizar movimientos complejos con alta precisión, reduciendo el temblor humano, el dolor postoperatorio y los tiempos de recuperación.

El robot Da Vinci no está programado para operar de forma autónoma; funciona mediante teleoperación, donde el cirujano controla cada movimiento en tiempo real desde una consola.
El sistema traduce los movimientos de las manos, muñecas y dedos del cirujano en señales digitales que se ejecutan con precisión milimétrica, eliminando el temblor natural y ofreciendo mayor rango de movimiento.
- No es Autónomo: el robot no toma decisiones, no se programa para operar solo ni actúa sin control humano; es una herramienta de alta precisión controlada por humanos.
- Consola del cirujano: el especialista, sentado a unos metros, utiliza joysticks y pedales para dirigir cuatro brazos robóticos.
- Traducción de movimientos: los movimientos manuales son escalados (ej. un movimiento de 5 cm de la mano se convierte en 1 cm dentro del paciente) y filtrados para eliminar temblores.
- Visión 3D de Alta Definición: la consola proporciona una vista inmersiva y magnificada del campo quirúrgico, facilitando procedimientos complejos.
- Instrumentos Endowrist: los instrumentos poseen una capacidad de giro superior a la muñeca humana, permitiendo suturas y cortes complejos en espacios reducidos.
- Seguridad: el sistema realiza millones de verificaciones por minuto. Si el cirujano retira la cabeza de la consola, el robot se inmoviliza automáticamente.
2002 Roomba
-
Lenguaje: C y C++.
-
Las primeras Roombas usaban microcontroladores limitados, programados principalmente en C para optimizar el uso de los sensores de contacto e infrarrojos. Versiones modernas ya incorporan Linux y permiten integración con Python a través de APIs.
Video de gato con traje disfraz de tiburón uno de los más vistos en Internet y Youtube:
2013 Atlas y Spot
Boston Dynamics es una empresa estadounidense de ingeniería y robótica que se especializa en la construcción de robots. La compañía fue fundada en 1992 por el ingeniero Marc Raibert, exprofesor del Instituto de Tecnología de Massachusetts.
El 13 de diciembre del 2013, fue comprada por Google. El 9 de junio del 2017, fue comprada por la empresa japonesa SoftBank.
El 10 de diciembre del 2020, la empresa fue vendida a Hyundai
+ info: https://es.wikipedia.org/wiki/Boston_Dynamics
-
Lenguaje: C++ y Python.
-
El control de equilibrio y la dinámica de alta velocidad de Atlas se programan en C++ por la necesidad de velocidad de ejecución milimétrica. Sin embargo, muchas de sus funciones de navegación autónoma y las interfaces para que los usuarios los controlen utilizan Python y ROS (Robot Operating System) un lenguaje específico creado para robots.

+ info: https://bostondynamics.com/
2024 Robot Ameca, robot humanoide dibuja en directo.
Ingenieros de la startup Engineered Arts, le solicitaron a Ameca dibujar al animal.
Sin embargo, el bosquejo resulta extremadamente básico a pesar de las notables cualidades realistas del robot.
Hemos pasado de engranajes físicos a LISP para la lógica, y finalmente a la combinación actual de C++ (para el movimiento) y Python (para la inteligencia).
¿Qué robots se están desarrollando actualmente?
Estamos viviendo un momento histórico: 2026 es el año en que los robots finalmente están saliendo de los laboratorios para entrar en las fábricas y, poco a poco, en nuestros hogares.
Ahora ya casi no necesitaremos saber programar para hacer robots ya que se hacen mediante prompt de voz directamente en tiempo real, con órdenes que se aplican y hacen que el mismo sistema robótico aprenda de cada corrección sugerida.
Aquí tienes los proyectos más avanzados que se están desarrollando y desplegando ahora mismo:
Robots Humanoides “General Purpose” (Propósito General)
Esta es la categoría que más está creciendo.
El objetivo es crear robots que puedan usar nuestras herramientas y trabajar en nuestros espacios.
-
Tesla Optimus (Gen 3): Elon Musk ha confirmado que el robot ya está en producción piloto. En 2026, miles de unidades están empezando a trabajar en las fábricas de Tesla, realizando tareas logísticas y de ensamblaje. Se espera su venta al público general para finales de 2027.
-
Figure 02 / Figure 03: Gracias a su alianza con OpenAI, los robots de Figure AI ya pueden mantener conversaciones fluidas mientras realizan tareas complejas. Actualmente están trabajando en plantas de BMW en EE. UU.
-
Boston Dynamics (Electric Atlas): Tras retirar al Atlas hidráulico, la nueva versión totalmente eléctrica se está desplegando en 2026 en las fábricas de Hyundai y en centros de Google DeepMind. Su agilidad es sobrehumana, con articulaciones que giran 360 grados.
-
1X NEO: A diferencia de los industriales, NEO está diseñado específicamente para el hogar. Es ligero, silencioso y seguro para interactuar con personas. Las primeras entregas a clientes particulares están programadas para este 2026.
2Robótica Industrial y Logística (Cobots y AMRs)
Ya no son solo brazos estáticos, ahora son inteligentes y móviles.
- Robots Colaborativos (Cobots): Empresas como Universal Robots están lanzando modelos (como el UR10e) que no necesitan programación compleja; aprenden simplemente moviendo el brazo con la mano.

+ info: https://www.kuka.com/es-es/aplicaciones/otras-aplicaciones-de-robot/cooperaci%c3%b3n-hombre-robot/cobots
- AMR (Robots Móviles Autónomos): Robots de logística que navegan por almacenes digitalizados gigantes de forma totalmente autónoma, optimizando rutas en tiempo real mediante 5G e IA física.
Salud y asistencia personal para reconocer emociones. Nanorrobótica y Medicina Interna. La robótica se hará microscópica.
-
Cirugía Robótica Da Vinci: Sigue evolucionando con IA integrada que ayuda a los cirujanos a predecir complicaciones durante la operación e incluso a operar mediante láser y diferentes técnicas
-
Robots en el torrente sanguíneo: Dispositivos a escala nanométrica podrán navegar por nuestras arterias para destruir tumores de forma localizada, limpiar placas de colesterol o realizar cirugías a nivel celular sin necesidad de incisiones externas.
- Robots de acompañamiento: En el CES 2026 se han presentado modelos como AiMe (de TCL) y Jennie (de Tombot), diseñados para combatir la soledad en personas mayores, capaces de reconocer emociones y responder con empatía.
Robots “todo terreno”
Deep Robotics DR02
Un humanoide industrial diseñado para condiciones extremas. Puede trabajar bajo la lluvia, en exteriores e incluso en cámaras frigoríficas a -20°C, algo donde la mayoría de los humanoides fallan.
El robot Bolt es la noticia más caliente en el mundo de la robótica ahora mismo (febrero de 2026). Se trata de un humanoide chino que acaba de romper un récord mundial de velocidad.
¿Qué es el Robot Bolt?
Es el nuevo robot humanoide desarrollado por un equipo de la Universidad de Zhejiang en colaboración con las startups MirrorMe Tech y Kaierda. Su nombre es un homenaje directo a Usain Bolt, el hombre más rápido de la historia.
El Hito: 10 metros por segundo
A principios de este mes (febrero de 2026), Bolt registró una velocidad punta de 10 m/s (36 km/h).
-
Para que te hagas una idea: el récord mundial humano de Usain Bolt es de 12,42 m/s.
-
Este robot ya corre más rápido que la gran mayoría de los seres humanos y ha pulverizado los registros de otros humanoides famosos como el H1 de Unitree.
| Característica | Detalle |
| Altura | 1,75 metros (tamaño humano real) |
| Peso | 75 kg |
| Velocidad | 10 m/s (Récord mundial para su clase) |
| Tecnología | Diseño optimizado para alta presión mecánica y equilibrio dinámico |
¿Por qué es importante?
Lo que asombra de Bolt no es solo que corra, sino cómo lo hace. En los vídeos de demostración se le ve compitiendo contra humanos en cintas de correr, manteniendo un equilibrio perfecto y una zancada constante, lo que demuestra un avance brutal en los sistemas de control de movimiento y motores de alto rendimiento.
El equipo detrás de Bolt (MirrorMe Tech) lleva desde 2016 enfocado obsesivamente en la velocidad. Su filosofía no es solo hacer máquinas útiles, sino superar los límites biológicos humanos.
Japón impone una nueva tendencia robótica
Lo mejor de la Expo IREX
¡Mira cómo el brazo robótico BOLT captura ángulos imposibles en vivo durante Election Station 2026! Velocidad y precisión que un humano no puede igualar. ¿El futuro de la TV?
El primer robot biomimético con inteligencia artificial de China, Moya.
Los robots humanoides acaban de entrar en una nueva fase de realismo.
En Shanghái, DroidUp presentó a Moya, el primer robot inteligente encarnado totalmente biomimético del mundo, diseñado para moverse, reaccionar e interactuar socialmente de maneras que se sienten humanas a un nivel sutil. Mientras que Moya se centra en expresiones y presencias humanas, el G1 de Unitree demostró que los robots pueden sobrevivir en entornos reales brutales, recorriendo terrenos con temperaturas bajo cero extremas.
El humanoide IRON de Xpeng mostró tanto las promesas como los límites de los robots de cara al público tras una caída viral en un escenario. Al mismo tiempo, investigadores de Harvard están rediseñando articulaciones robóticas basadas en la rodilla humana, y Westwood Robotics está enseñando a los humanoides a trabajar mientras caminan, acercando las máquinas a su utilidad en el mundo real.
¿Qué ha cambiado en robótica en 2026?
La gran diferencia respecto a años anteriores es la IA Física. Ya no programamos cada movimiento línea por línea. Ahora, los robots usan modelos VLA (Vision-Language-Action): les das una orden hablada (“Limpia ese derrame”), ellos ven el entorno y deciden por sí mismos qué movimientos hacer para cumplir la tarea.
La Era de la IA Física (Embodied AI)
Hasta ahora, la IA vivía en pantallas y servidores. El futuro es la IA con cuerpo.
-
Aprendizaje por observación: Los robots ya no se programarán línea a línea. Aprenderán tareas domésticas o industriales simplemente mirando un vídeo de un humano haciéndolas o mediante simulaciones en el metaverso (Gemelos Digitales) que luego se transfieren al robot físico.
-
Autonomía semántica: Podrás decirle a un robot: “Ordena el salón”, y él entenderá qué es el desorden, dónde van las llaves y cómo tratar objetos delicados sin instrucciones previas.
Robótica Blanda (Soft Robotics)
Sustituiremos el metal y los motores rígidos por polímeros y materiales flexibles.
-
Inspiración biológica: Veremos robots inspirados en pulpos o músculos humanos que pueden deformarse para entrar en espacios estrechos o manipular objetos frágiles (como frutas o tejidos humanos) con una delicadeza imposible para el acero.
-
Seguridad absoluta: Al ser blandos, la convivencia física con humanos en hogares y hospitales será mucho más segura y natural.
Robótica sostenible y biodegradable
Para evitar un problema de residuos electrónicos, trabajar la eficiencia energética, la economía circular, el futuro apunta a:
-
Materiales orgánicos: robots fabricados con materiales que pueden compostarse o reciclarse fácilmente al final de su vida útil.
-
Eficiencia energética extrema: robots que obtienen energía del calor ambiental, del movimiento o de pequeñas placas solares integradas en su “piel”.
Cobotización Universal
El concepto de “robot que sustituye al humano” cambiará por el de “robot que aumenta al humano”.
-
Exoesqueletos invisibles: Ropa inteligente con fibras motorizadas que ayudarán a personas con movilidad reducida a caminar o a trabajadores industriales a levantar grandes pesos sin esfuerzo ni lesiones.
-
Colaboración total: En las oficinas y comercios, los robots se encargarán de la logística pesada y el análisis de datos, dejando que las personas se centren en la creatividad y la estrategia.
Economía del ocio y robots
Si los robots realizan la mayor parte del trabajo productivo, la sociedad tendrá que redefinir el concepto de empleo y formación.
También se está investigando con robots en temas de consumo de redes sociales y videos en Internet:
Ponen un robot a ver YouTube y lo que aprende es una habilidad (casi) única de los seres humanos
El experimento pretende demostrar que la observación puede sustituir a la programación en la adquisición de gestos complejos. El aprendizaje se ha realizado sin reglas preestablecidas
EMO, cantando después de haber visto cientos de horas de vídeos en YouTube (YouTube/Columbia Engineering)
El avance, descrito en la revista científica Science Robotics, demuestra que la observación audiovisual puede sustituir a la programación tradicional en la adquisición de gestos complejos ligados al habla.
El diseño físico resulta determinante para este logro. EMO dispone de labios de silicona blanda con diez grados de libertad, accionados por 26 motores, lo que le permite ejecutar movimientos sutiles y continuos. Esta arquitectura se aleja de los mecanismos rígidos habituales y facilita una comunicación visual más natural.
El investigador principal, Yuhang Hu, destaca que la integración de esta capacidad con modelos conversacionales como ChatGPT podría reforzar el vínculo entre personas y robots. Como demostración creativa, el equipo ha presentado incluso un álbum generado por inteligencia artificial, titulado Hello World_, en el que EMO aplica lo aprendido al canto.
+ info: https://www.elconfidencial.com/tecnologia/2026-02-07/robot-youtube-habilidad-unica-humanos-1qrt_4298766/
:format(jpg)/f.elconfidencial.com%2Foriginal%2F758%2Faa1%2F747%2F758aa17471891628cb525b681d48a6d0.jpg)
¿Cómo crees que evolucionará la Robótica del futuro?
¿Te parece interesante? ¿Quieres aprender a programar y crear tus propios robots y aplicaciones informáticas?
Empieza hoy mismo tu curso o Master en CIPSA.NET